

Soft_XR
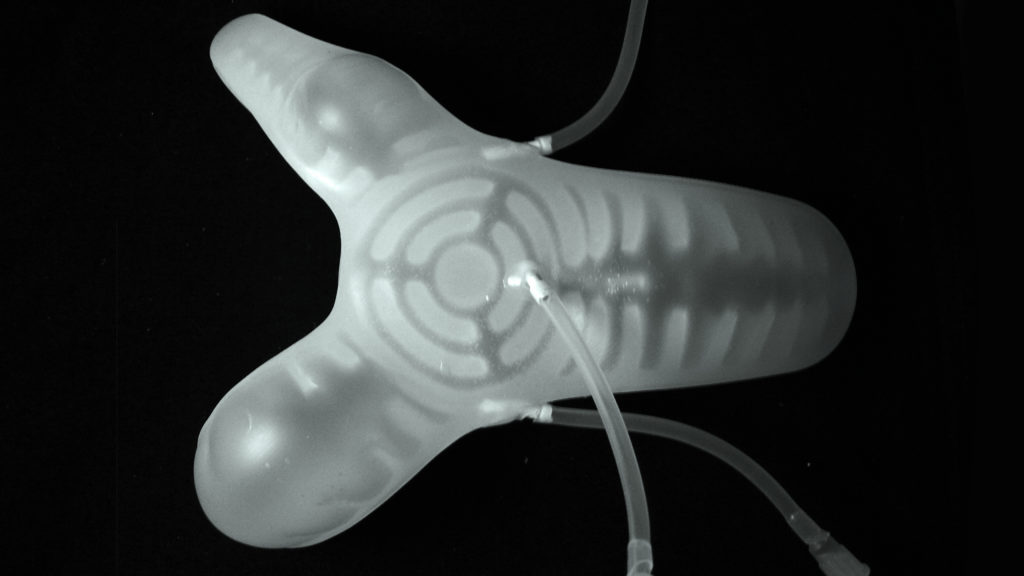
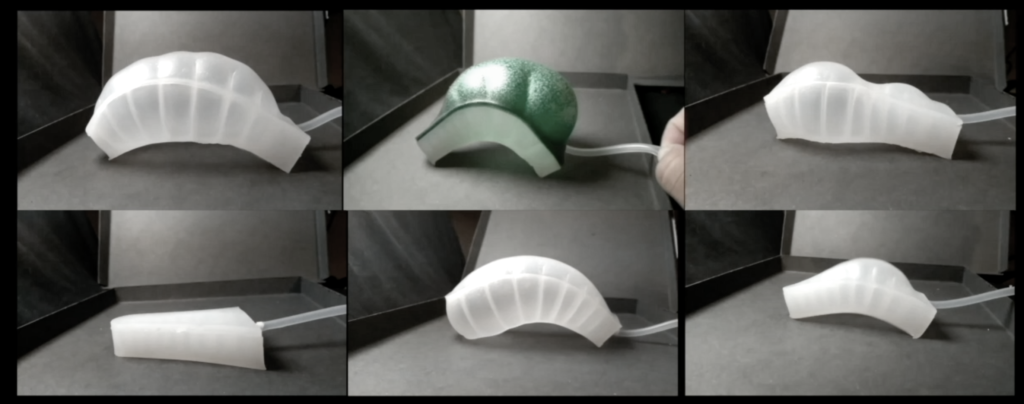
The project aims to analyse a way to explore, discover and finally repair such damaged parts of building surfaces, by usage of an intelligent swarm robot system of soft-robotic explorer units.
While there are already severe ways of solving this task – like fix placed cameras and sensors, the papers approach solving error finding via the adaptivity of circumstances of these robots. The main objective, aside from proposing a strong concept, was developing a programmed, automated locomotion of the robot units. For solving this task, it is crucial to understand the silicone material properties which are suitable for the robots body. This is only possible by analysis of empirical testing.
Student design project by Timo Sippach, University of Stuttgart.
Seminar: Flexible Forms, SS 18